本文简要介绍了电动式关节型机器人机械手的概念,机械手硬件和软件的组成,机械手各个部件的整体尺寸设计,气动技术的特点。本文对机械手进行总体方案设计,确定了机械手的坐标形式和自由度,确定了机械手的技术参数。同时,设计了机械手的夹持式手部结构,设计了机械手的手腕结构,计算出了手腕转动时所需的驱动力矩和回转气缸的驱动力矩。设计了机械手的手臂结构。设计出了机械手的气动系统,绘制了机械手气压系统工作原理图,大大提高了绘图效率和图纸质量,画出了机械手的装配图图。
关键词: 工业机器人 机械手 电动 电动式关节型机器人机械手
课题基本参数的确定
1、手部负重:10kg(抓取物体的形状为圆柱体.圆柱半径.高度自定.密度7.8g/cm3.)
2、自由度数:4个,沿Z轴的上下移动,绕Z轴转动,沿X 轴的伸缩,绕X轴的转动
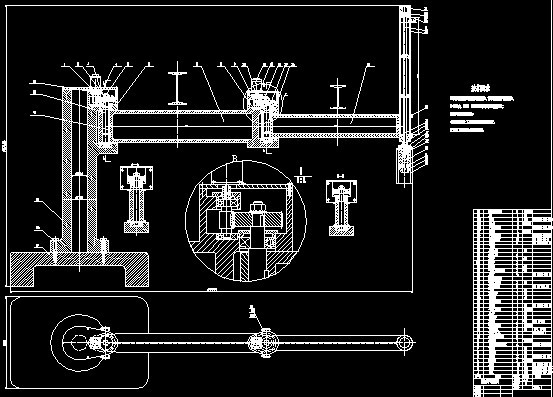
3、 坐标型式:圆柱坐标,其圆柱坐标型式的运动简图如图所示(见图1)
4、 最大工作半径:1800mm,最小工作半径1350mm
5、 手臂最高中心位置:1012mm
或伺服电机上端最高行程:1387mm(见图2)
最小行程:1237mm
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() ω φ
ω φ
![]()
![]()
![]()
![]() X
X
![]()
![]() Z
Z
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
图1.2
6、 ![]()
![]() 手臂运动参数:
手臂运动参数:
伸缩行程(X):450
伸缩速度:〈250mm/s
升降行程(Z):150mm
升降速度:〈60mm/s
回转范围(φ):0~180度
回转速度:〈70/s
7、 手腕运动参数:
回转范围(ω):0~180
回转速度:90/s
8、 手臂握力:由N=0.5/f*G定
这里取f=0.1 G=10kg
N=0.5/f*G=50kg
即手指握力为50kg
9、 定位方式:闭环伺服定位
10、 重复定位精度:±0.05mm
11、 驱动方式:电气(伺服电机)
12、 控制方式:采用MGS-51单片微机
第2章 结构的设计
2.1手部机构
手部机构是机器人机械手直接与工件、工具等接触的部件,它能执行人手的部分功能。目前,根据被抓取工件、工件等的形状、尺寸、重量、易碎性、表面粗糙度的不同,在工业生产中使用着多种形式的手部机构,最常见的是钳爪式、磁吸式和气吸式,也有少数的特殊形式。不同形式的手部机构其夹紧力的计算各有不同。
钳爪式手部机构是最常见的形式之一。手爪有两个、三个或多个,其中两个的最多。抓取工件的方式有两种:外卡式和内撑式。从其机械机构特征、外观与功用来看,有多种形式,它们分别是:
(1) 拨杆杠杆式钳爪
(2) 平行连杆式钳爪
(3) 齿轮齿条移动式钳爪
(4) 重力式钳爪
(5) 自锁式钳爪
(6) 自动定心钳爪
(7) 抓取不同直径工件的钳爪
(8) 具有压力接触销的钳爪
(9) 抓勾与定位销十钳爪
(10) 复杂形状工件用的自动调整式钳爪
(11) 同时抓取一对工件的钳爪与内撑式三指钳爪
(12) 特殊式手指钳爪
同时对钳爪的选用也非常重要,应考虑以下几个方面:
1 应具有足够的夹紧力,这样才能防止工件在移动过程中脱落,一般夹紧力为工件重量的2到3倍。
2 应具有足够的张开角,来适应它抓取和松开工件之间较大的直径范围,而且夹持工件中心位置变化要小(即定位误差小)。
3 应具有足够的强度和刚度,以免承受在运动过程中产生的惯性力和震动的影响。
4 应能保证工件的可靠定位
5 应适应被抓取对象的要求
6 尽可能具有一定的通用性
夹持式手部结构由手指(或手爪)和传力机构所组成。其传力结构形式比较多,如滑槽杠杆式、斜楔杠杆式、齿轮齿条式、弹簧杠杆式等。
2.1.1手指的形状和分类
夹持式是最常见的一种,其中常用的有两指式、多指式和双手双指式:按手指夹持工件的部位又可分为内卡式(或内涨式)和外夹式两种:按模仿人手手指的动作,手指可分为一支点回转型,二支点回转型和移动型(或称直进型),其中以二支点回转型为基本型式。当二支点回转型手指的两个回转支点的距离缩小到无穷小时,就变成了一支点回转型手指;同理,当二支点回转型手指的手指长度变成无穷长时,就成为移动型。回转型手指开闭角较小,结构简单,制造容易,应用广泛。移动型应用较少,其结构比较复杂庞大,当移动型手指夹持直径变化的零件时不影响其轴心的位置,能适应不同直径的工件。
2.1.2设计时考虑的几个问题
(一)具有足够的握力(即夹紧力)
在确定手指的握力时,除考虑工件重量外,还应考虑在传送或操作过程中所产生的惯性力和振动,以保证工件不致产生松动或脱落。
(二)手指间应具有一定的开闭角
两手指张开与闭合的两个极限位置所夹的角度称为手指的开闭角。手指的开闭角应保证工件能顺利进入或脱开,若夹持不同直径的工件,应按最大直径的工件考虑。对于移动型手指只有开闭幅度的要求。
(三)保证工件准确定位
为使手指和被夹持工件保持准确的相对位置,必须根据被抓取工件的形状,选择相应的手指形状。例如圆柱形工件采用带“V”形面的手指,以便自动定心。
(四)具有足够的强度和刚度
手指除受到被夹持工件的反作用力外,还受到机械手在运动过程中所产生的惯性力和振动的影响,要求有足够的强度和刚度以防折断或弯曲变形,当应尽量使结构简单紧凑,自重轻,并使手部的中心在手腕的回转轴线上,以使手腕的扭转力矩最小为佳。
(五)考虑被抓取对象的要求
根据机械手的工作需要,通过比较,我们采用的机械手的手部结构是一支点, 两指回转型,由于工件多为圆柱形,故手指形状设计成V型,其结构如附图所示。
臂部.dwg
传动原理图.dwg
工作空间图.dwg
机构简图.dwg
机身.dwg
零件图-齿轮轴.dwg
零件图-轴.dwg
装配图.dwg
电动式关节型机器人机械手的结构设计与...
任务书.doc