PLC外部接线图.dwg
步进梯形图.dwg
操作面板.dwg
初始化及警报程序.dwg
气动驱动原理图.dwg
手动操作面板.dwg
手动程序.dwg
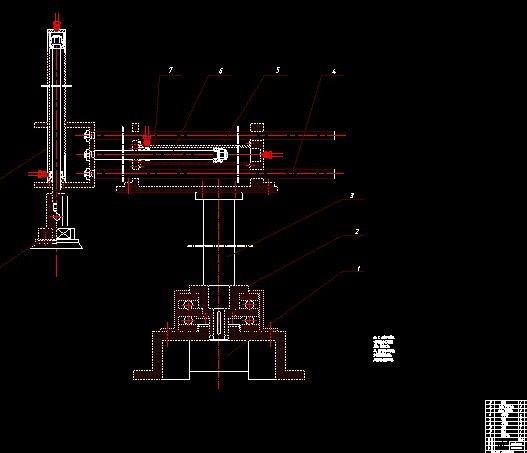
物料分拣机械手装配图.dwg
吸盘.dwg
吸盘结构图.dwg
状态转移图.dwg
总程序结构框图.dwg
毕业设计论文.doc
开题报告.doc
机械手作为前沿的产品应自动化设备更新时的需要,可以大量代替单调往复或高精度需求的工作,在先进制造领域中扮演着极其重要的角色。它可以搬运货物、分拣物品、代替人的繁重劳动。可以实现生产的机械化和自动化,能在高温、腐蚀及有毒气体等环境下操作以保护人身安全,可以广泛应用于机械制造、冶金、电子、轻工业和原子能等部门。
随着工业的高速发展,机械手作为前沿的产品应自动化设备更新时的需要,已经在工业生产中得到了广泛的应用。它可以搬运货物、分拣物品、用以代替人的繁重及单调劳动,实现生产的机械化和自动化;并能在高温、腐蚀及有毒气体等有害环境下操作以保护人身安全,被广泛应用于机械制造、冶金、电子、轻工业和原子能等部门。
可编程控制器(PLC)是以中央处理器为核心,综合了计算机和自动控制等先进技术,具有可靠性高、功能完善、组合灵活、编程简单、功耗低等优点,已成为目前在机械手控制系统中使用最多的控制方式。使用PLC的自动控制系统具有体积小,可靠高,故障率低,动作精度高等优点。
适应工业需要,本课题试图开发PLC对物料分拣机械手的控制,并借助必要的精密传感器,使其能够对不同颜色的物料按预先设定的程序进行分拣,动作灵活多样,适用于可变换生产品种的中小批量自动化生产,广泛应用于柔性生产线。采用PLC控制,是一种预先设定的程序进行物料分拣的自动化装置,可部分代替人工在高温和危险的作业区进行单调持久的作业,并且在产品变化或临时需要对机械手进行新的分配任务时,可以允许方便的改动或重新设计其新部件,而对于位置改变时,只要重新编程,并能很快地投产,降低安装和转换工作的费用。本设计主要完成机械手的硬件部分与软件部分设计。主要包括执行系统、驱动系统和控制系统的设计。
1.2 机械手在国内外现状和发展趋势
机械手最早应用在汽车制造工业,常用于焊接、喷漆、上下料和搬运。机械手延伸和扩大了人的手足和大脑功能,它可替代人从事危险、有害、有毒、低温和高热等恶劣环境中的工作;代替人完成繁重、单调重复劳动,提高劳动生产率,保证产品质量。目前主要应用于制造业中,特别是电器制造、汽车制造、塑料加工、通用机械制造及金属加工等工业。工业机械手与数控加工中心,自动搬运小车与自动检测系统可组成柔性制造系统(FMS)和计算机集成制造系统,实现生产自动化。随着生产的发展,功能和性能的不断改善和提高,机械手的应用领域日益扩大。
目前,国际上的机械手公司主要分为日系和欧系。日系中主要有安川、oTC、松下、FANLUC、不二越、川崎等公司的产品。欧系中主要有德国的KUKA、CLOOS、瑞典的ABB、意大利的C0毗U及奥地利的工GM公司。
我国机械手起步于20世纪70年代初期,经过30多年发展,大致经历了3个阶段:70年代萌芽期,80年代的开发期和90年代的应用化期。在我国,机械手市场份额大部分被国外机械手企业占据着。在国际强手面前,国内的机械手企业面临着相当大的竞争压力。如今我国正从一个“制造大国”向“制造强国”迈进,中国制造业面临着与国际接轨、参与国际分工的巨大挑战,对我国工业自动化的提高迫在眉睫,政府务必会加大对机器人的资金投入和政策支持,将会给机械手产业发展注入新的动力。
随着机械手发展的深度和广度以及机器人智能水平的提高,机械手已在众多领域得到了应用。从传统的汽车制造领域向非制造领域延伸。如采矿机器人、建筑业机器人以及水电系统用于维护维修的机器人等。在国防军事、医疗卫生、食品加工、生活服务等领域机械手的应用也越来越多。
在未来几年,传感技术,激光技术,工程网络技术将会被广泛应用在机械手工作领域,这些技术会使机械手的应用更为高效,高质,运行成本低。据猜测,今后机器人将在医疗、保健、生物技术和产业、教育、救灾、海洋开发、机器维修、交通运输和农业水产等领域得到应用。
1.3 主要研究的内容
随着机械手技术的飞速发展和机械手应用领域的不断深化,不仅要求其控制可靠性强、使用灵活性高和操作灵活性好,还要其成本低、可开发经济性强。本论文主要研究物料分拣机械手以下几个方面的内容:
物料分拣机械手执行系统的分析与选择
执行系统是由传动部件与机械构件组成,是机械手赖以实现各种运动的实体。主要包括机身、手臂、末端执行器3部分组成,其中每一部分都可以具有若干的自由度。执行系统的设计主要是对机械手的手部、手臂和机座进行设计。
物料分拣机械手驱动系统的分析与选择
驱动系统是向执行系统各部分提供动力的装置。通过对液压、气压、电气三种驱动方式的比较,本设计选择气压驱动的方式。内容包括气动元件的选择及其工作原理、气动回路的设计和气动原理图的绘制。
物料分拣机械手控制系统的设计
控制系统是机械手的指挥系统,它控制驱动系统,让执行系统按规定的要求和时序进行工作。本机械手采用可编程控制器(PLC)对机械手进行控制,主要包括对PLC的型号选择、传感器类型进行选择、I/O口的选择、对控制系统原理图、自动程序梯形图的绘制等内容。
1.4 解决的关键问题
1 解决机械手机械结构的设计问题,要求机械手结构简单、经济、具有一定的代表性。
2 执行部件的运动精度的问题。
3 机械手的控制系统,包括控制系统的电路和控制程序,并解决工件和控制 系统的协调问题。
4 元件的匹配规则和知识的获取及其表达形式。
5 传感器的类型选择。
目 录 I
摘 要 IV
Abstract V
第一章 前言 1
1.1 研究的目的及意义 1
1.2 机械手在国内外现状和发展趋势 1
1.3 主要研究的内容 2
1.4 解决的关键问题 3
第二章 执行系统的分析与选择 4
2.1 执行机构坐标形式的选择 4
2.2 执行机构的组成 6
2.3 执行机构各部分的分析与选择 6
2.3.1 手部的选择 6
2.3.2 手臂结构的选择 8
2.3.3 机座结构的选择 9
2.4 执行机构的工作原理 10
2.5 执行机构简图 10
第三章 驱动系统的分析与选择 12
3.1 驱动系统的分析与选择 12
3.2 机械手驱动系统的控制设计 13
3.3 气动元件选取及工作原理 14
3.3.1 气源装置 14
3.3.2 执行元件 15
3.3.3 控制元件 16
3.3.4 辅助元件 17
3.3.5 真空发生器 18
3.3.6 吸盘 18
3.4 气动回路的工作原理 18
第四章 控制系统的分析设计 22
4.1 控制系统的组成结构 22
4.2 控制系统的性能要求 22
4.3 传感器的选择 23
4.3.1 位置检测装置 23
4.3.2 滑觉传感器 23
4.3.3 视觉传感器 24
4.4 控制系统PLC的选型及控制原理 25
4.4.1 PLC控制系统设计的基本原则 25
4.4.2 PLC种类及型号选择 30
4.4.3 I/O点数分配 30
4.4.4 PLC外部接线图 32
4.4.5 机械手控制原理 32
4.5 PLC程序设计 34
4.5.1 总体程序框图 34
4.5.2 初始化及报警程序 36
4.5.3 手动控制程序 37
4.5.4 自动控制程序 39
第五章 总结与展望 42
参考文献 43
致 谢 44
附 录 45